



Apo paheʻe uila kinoea OD40mm 2 mau kahawai kahawai kinoea a me 6 mau kahawai mana 2A no ka Collaborative Robot Joint






2 ʻAoʻao Pneumatic + Uila Rotary Joint
◆ Hiki ke hui pū e hoʻouna i ka mana a me nā hōʻailona
◆ Nā awa maʻamau M5, hiki iā G1/8, G1/4, G3/8, G1/2, G3/4
◆ Hiki ke hoʻopilikino ʻia nā kikoʻī
◆ Mea Hale, Alloy Aluminium
◆ Mahana Hana, -20℃-+80℃
◆ Ka Haumākū Hana, 60% RH
◆ Papa Hoʻomalu, IP51
Nā Hoʻohana Maʻamau
ʻO kēia apo paheʻe uila me ke anawaena waho he 40mm, 2 mau kaapuni pneumatic a me 6 mau kaapuni uila (2A) he ʻāpana hana maʻamau i hōʻailona ʻia e ka "nui liʻiliʻi, hiki ke kahawai he nui, a me ka hoʻohana ʻana i ka mana haʻahaʻa." Ua hoʻolālā ʻia no nā lako hana automated kiʻekiʻe, hoʻohui nui ʻia, robotics, a me nā mea hana kiʻekiʻe.
1. Hoʻohui Lopako Hana Pū (Cobot)
2. Ke hoʻohuli nei i ka papa hana/disc indexing
3. Nā lako hana automation kūikawā
4. Mea hoʻokō hopena robot (EOAT)
5. Nā lako hana diagnostics e hoʻohuli ana
6. Nā lako hoʻāʻo pololei
Ka Wehewehe ʻana i ka Inoa Huahana
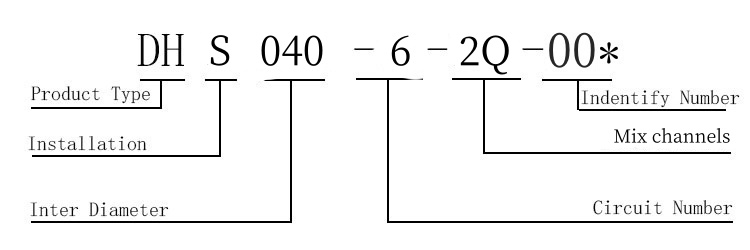
1. ʻAno huahana: DH—apo paheʻe uila
2. Ke ʻano hoʻonohonoho: S—apo paheʻe koʻokoʻo paʻa; S—Apo paheʻe koʻokoʻo paʻa
3. Ke anawaena o waho: 040-40 mm
4.Helu o nā alahele kinoea: alahele pneumatic 2Q-2
Helu + Q- helu o nā alahele o ke apo paheʻe kinoea; Helu + Y - helu o nā alahele o ke apo paheʻe wai
5. Kuhikuhi i ka helu: –XXX; I mea e hoʻokaʻawale ai i nā kikoʻī like ʻole o ke kumu hoʻohālike huahana like, hoʻohui ʻia ka helu ʻike ma hope o ka inoa. No ka laʻana: LHS135-2Q-002, inā he nui aku o kēia kumu hoʻohālike i ka wā e hiki mai ana, a pēlā aku -003, -004, a pēlā aku.
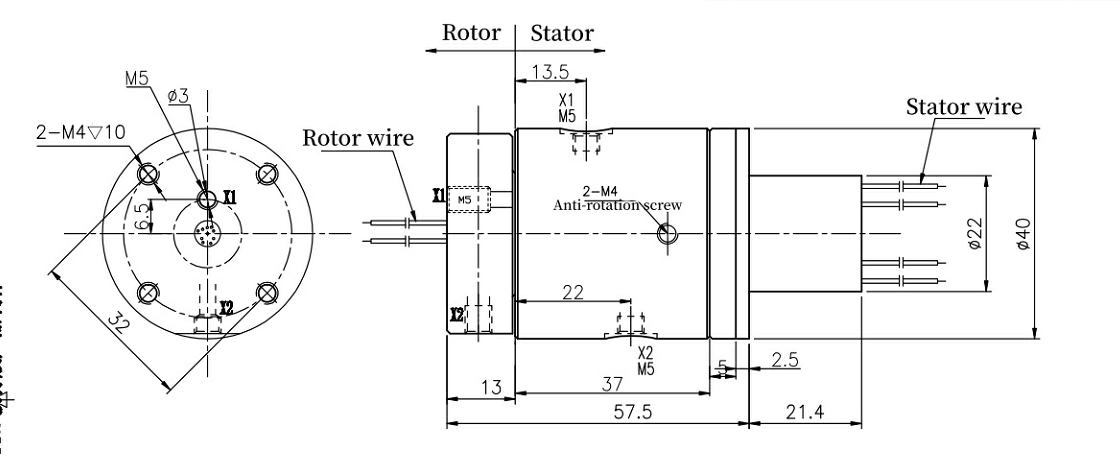
Kaha kiʻi o ke apo paheʻe Pneumatic-Uila
If you need design more 2D or 3D drawing ,please send informations to our via email [email protected],our engineer will make it for you as soon ,thank you





